

Voy a comenzar una nueva serie de artículos en los que voy a hablar de mis experiencias con los drones cinemáticos. Como siempre empezaré desde cero porque así es como en realidad empieza todo: sin tener mucha idea. Surgirán problemas, accidentes, pruebas que saldrán mal y bien……..en definitiva lo que se considera aprendizaje en cualquier disciplina. Espero que no suponga demasiado gasto.
¿Por qué me compré un drone cinemático?. Mi interés por comprarme un dron cinemático surgió a raíz de ver vídeos de profesionales y de aficionados que se dedican al pilotaje de drones y con los que consiguen imágenes de gran calidad en vuelos muy lentos y en apariencia muy sencillos de realizar. Como todo, es en apariencia y en realidad, hay que saber bastante del tema para conseguir esos vuelos controlados con imágenes perfectas.
Tras estar con el simulador velocidrone durante bastante tiempo cuando estuvimos confinados con la pandemia dije que sería interesante conseguir pilotajes de ese tipo para poder hacer grabaciones interesantes para empresas y particulares tanto de interior como de exterior. Estuve mirando y consultando con amigos y expertos cuál era el dron que más me interesaba tener para esta finalidad. Es muy importante saber qué drone necesitas para lo que quieres hacer porque hay tal variedad que te puedes equivocar con mucha facilidad. Al final tras mirar muchos modelos, me decidí por el GEPRC Cinelog 25 y tengo la sensación de que no me equivoqué. Lo he encontrado muy robusto para lo poco que pesa y la verdad es que cumple las expectativas.
Dron cinemático GEPRC Cinelog25

Dron cinemático GEPRC Cinelog25
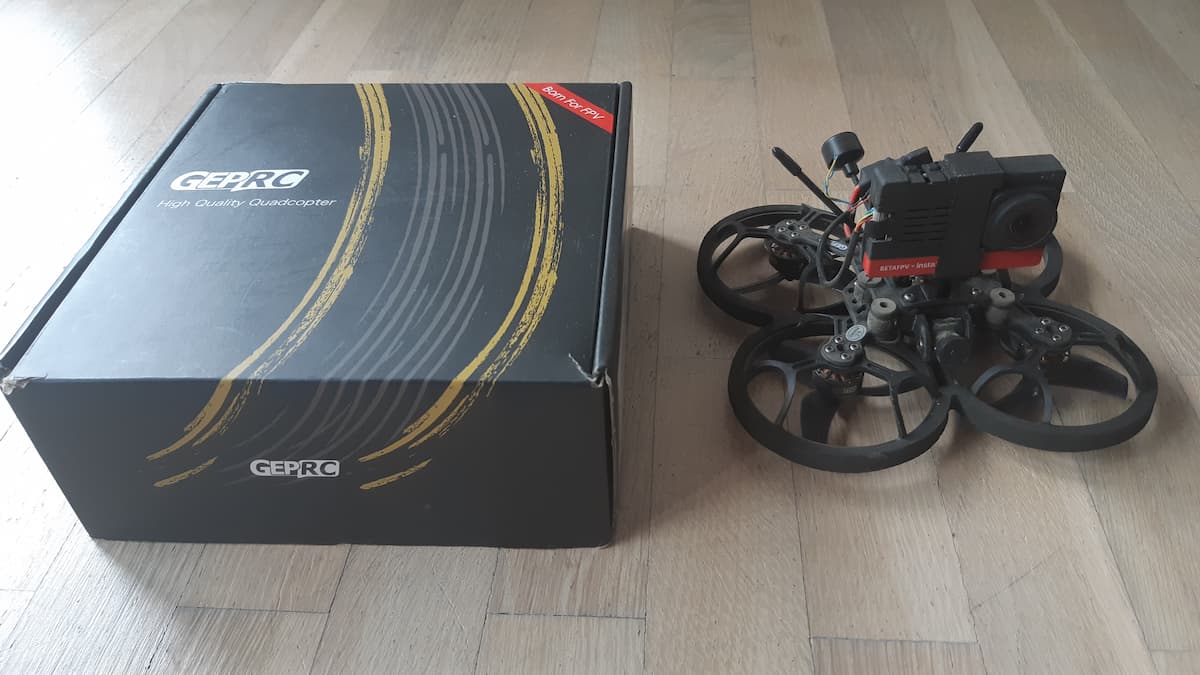
Dron Cinemático GEPRC Cinelog25
CARACTERÍSTICAS DEL DRON GEPRC CINELOG 25:
Sus características eran las que necesitaba para vuelos en interior y exterior:
-Es un cuadricóptero de 2,5 pulgadas (distancia entre ejes de 109 mm),
– Lleva una GEP-20A-F4 como controladora de vuelo,
– MCU: STM32F411,
-IMU: MPU6000 (SPI),
-OSD: BetaFlight OSC con chip AT7456E,
-ESC: BLhli_S 20A,
-VTX: 5,8 G 600mW VTX,
-Cámara: Runcam Nano2,
-Puntales: GEMFAN D63-3,
– Motores: GR1404 4500KV (versión mejorada),
-Peso analógico CineLog25: 111, 1g sin batería,
-Emplea baterías 4s entre 450-750 mAh.
Si queréis comprarlo, haced link aquí:

GEPRC CineLog 25 4S 2,5″ CineWhoop Versión analógica FPV Racing RC Drone 5,8G 600mW VTX Runcam Nano2 Cámara
En mi caso me compré 7 baterías de 650 mAh, a pesar de que soporta rangos de batería de entre 450 y 750 mAh, pero para lo que yo necesito voy que me mato con estas de 650. Me pillé 7 para tener posibilidad de volar en torno a 30 minutos al tener una autonomía de así 5 minutos por batería.
Como aún no me he pasado al sistema digital que considero todavía caro y quiero amortizar aún lo invertido, me compré la versión analógica del GEPRC CineLog25 que es más barato y así seguir utilizando mis gafas Eachine Ev 100 que pronto jubilaré porque su FOV es muy pequeño y necesito más resolución para que la sensación de vuelo sea más inmersiva y no tan focalizada al centro de la imagen. Eso facilita los giros y el tener algo de perspectiva para saber qué te pueden encontrar tras girar. Y necesito ver bien para que los vuelos sean más coordinados y mejores.
También quería que el dron que me comprara soportara una cámara de 4k para que las imágenes tuvieran la calidad necesaria, que estuviera por debajo de los 250 gramos de peso con todos sus componentes instalados (cámara, batería, protectores, etc) para poder volar con la licencia A1/A3 o incluso con el A2 o con el STS 01 si me animo a pedir las autorizaciones necesarias para volar en espacios aéreos controlados CTR, aglomeraciones de edificios y personas. Como tengo todos los permisos en breve me pondré a ello.
En mi inconsciencia quise probarlo el primer día que llegó y tras hacer las pertinentes configuraciones en Betaflight y meterle los modos de vuelo Angle, Horizon y Acro, configurar el OSD para ver los parámetros que necesito para ver en mis gafas fpv durante el vuelo, le puse el soporte de la cámara que tengo por casa (una Runcam 4s vieja que pesa 90 gramos batería incluida) y me fui a volar a una nave. Estaba a la espera de la maravillosa cámara BetaFPV SMO 4k que me había comprado pero no había llegado aún. Con esa cámara bajaría peso y estaría por debajo de los ansiados 250 gramos para poder volar con menos restricciones normativas.
Gran error volar con la Runcam 4s porque esa cámara no es la indicada para ese dron: pesa mucho y hace que el centro de gravedad cambie demasiado, aparte de forzar los motores más de lo que indican las especificaciones técnicas. Existía el peligro de que se quemaran los motores pero había que estrenarlo sí o sí. Me di unos garbeos con bastante miedo y quedé encantado con el modelo del dron y su maniobrabilidad al menos en interior. Otro día ya probaríamos volar en exterior para ver cómo un dron con poco peso como éste combate el viento. Pero eso será otro día.
Os pongo el primer vuelo con él: